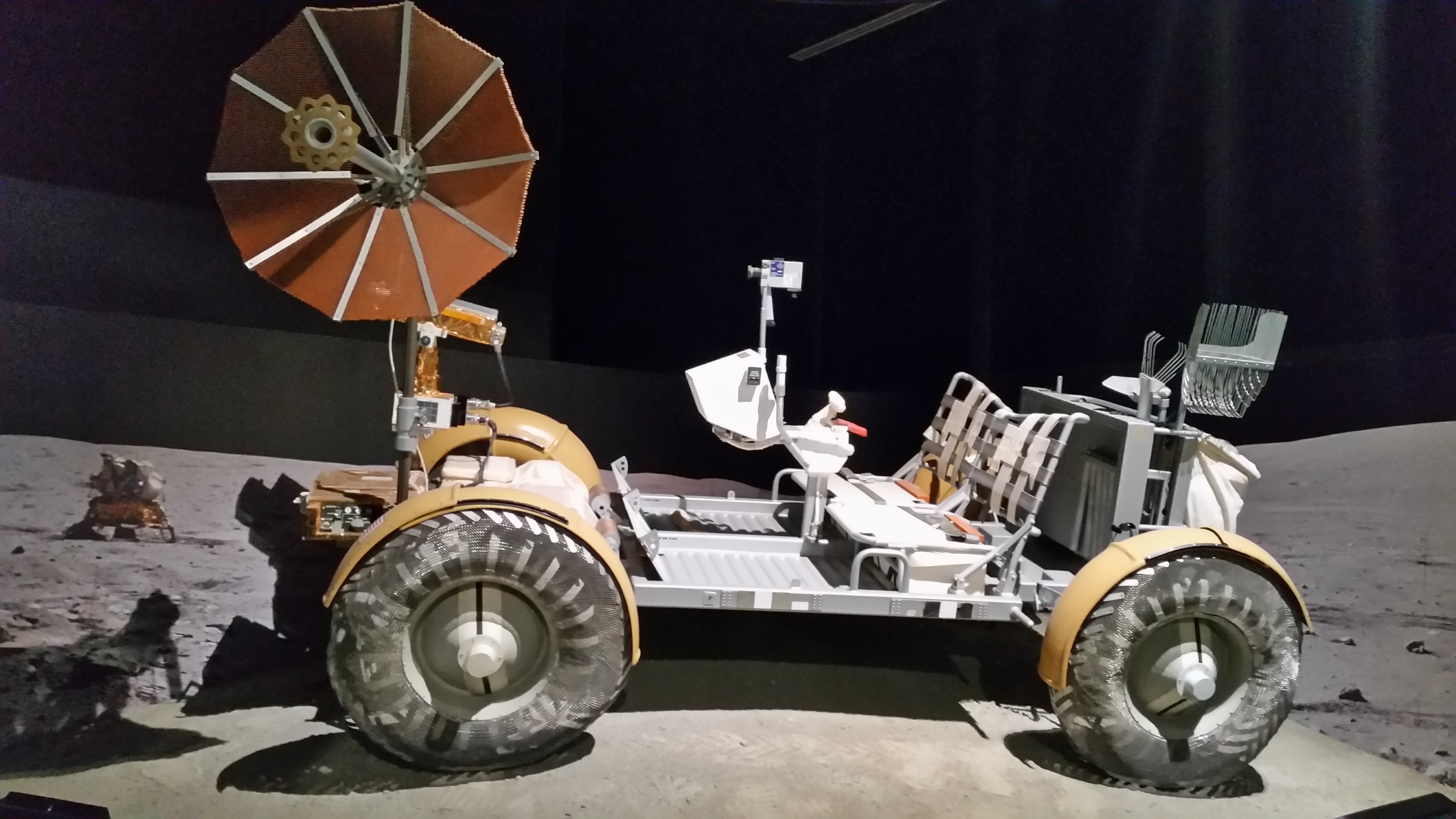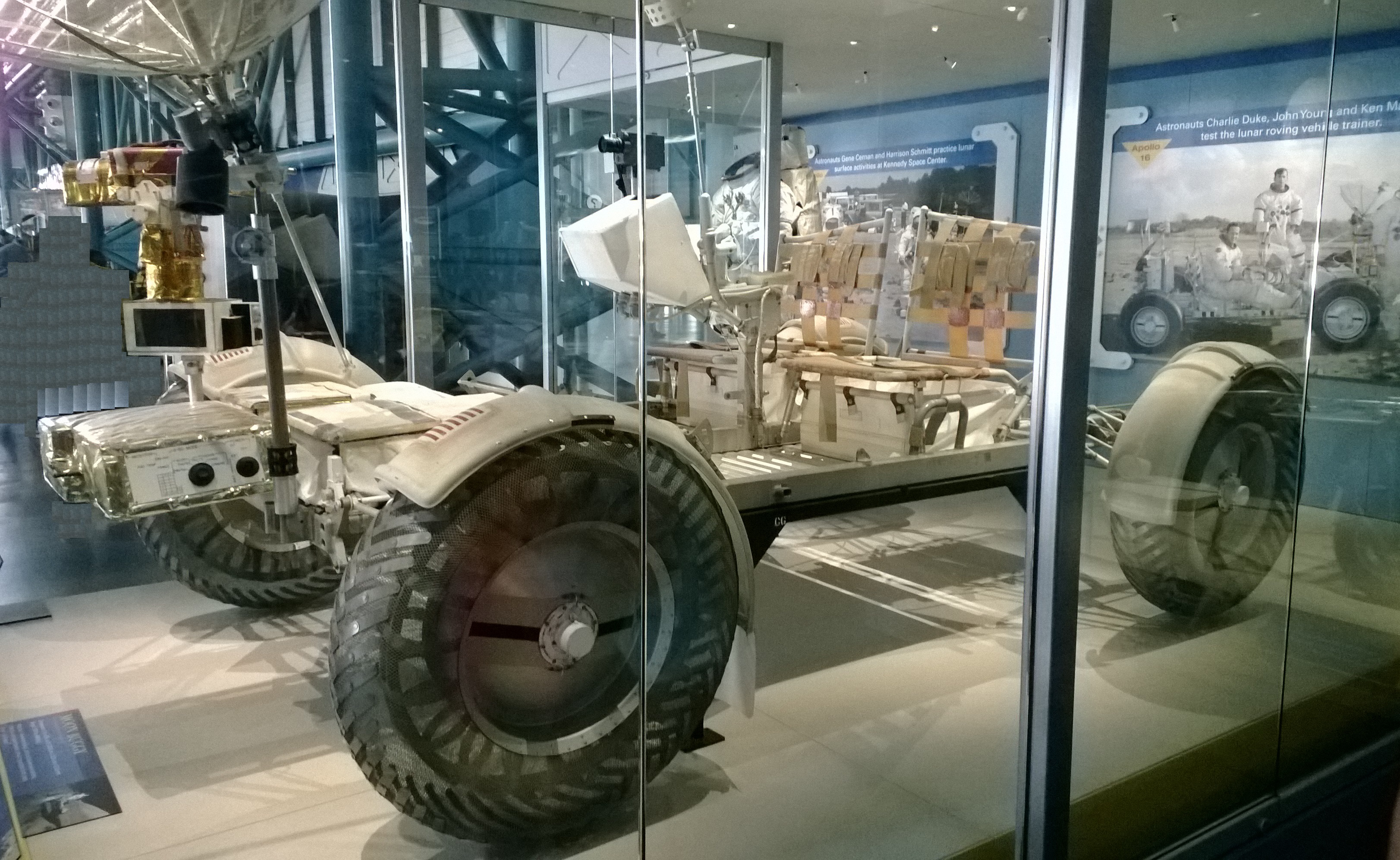
NASA Apollo Lunar Rover at Kennedy Space Center Visitor Complex
_(1).JPG)
Lunokhod 1

NASA Apollo 15 Lunar Rover on the Moon

NASA Sojourner rover on Mars
NASA Sojourner rover 8085 based computer
Photo taken by the Chang'e-4 lander on Jan 11, 2019 shows the Yutu-2 rover. The Yutu-2 rover and the Chang'e-4 lander took photos of each other. [Photo/Xinhua/China National Space Administration]
Cameras of the Perceverance Mars Rover
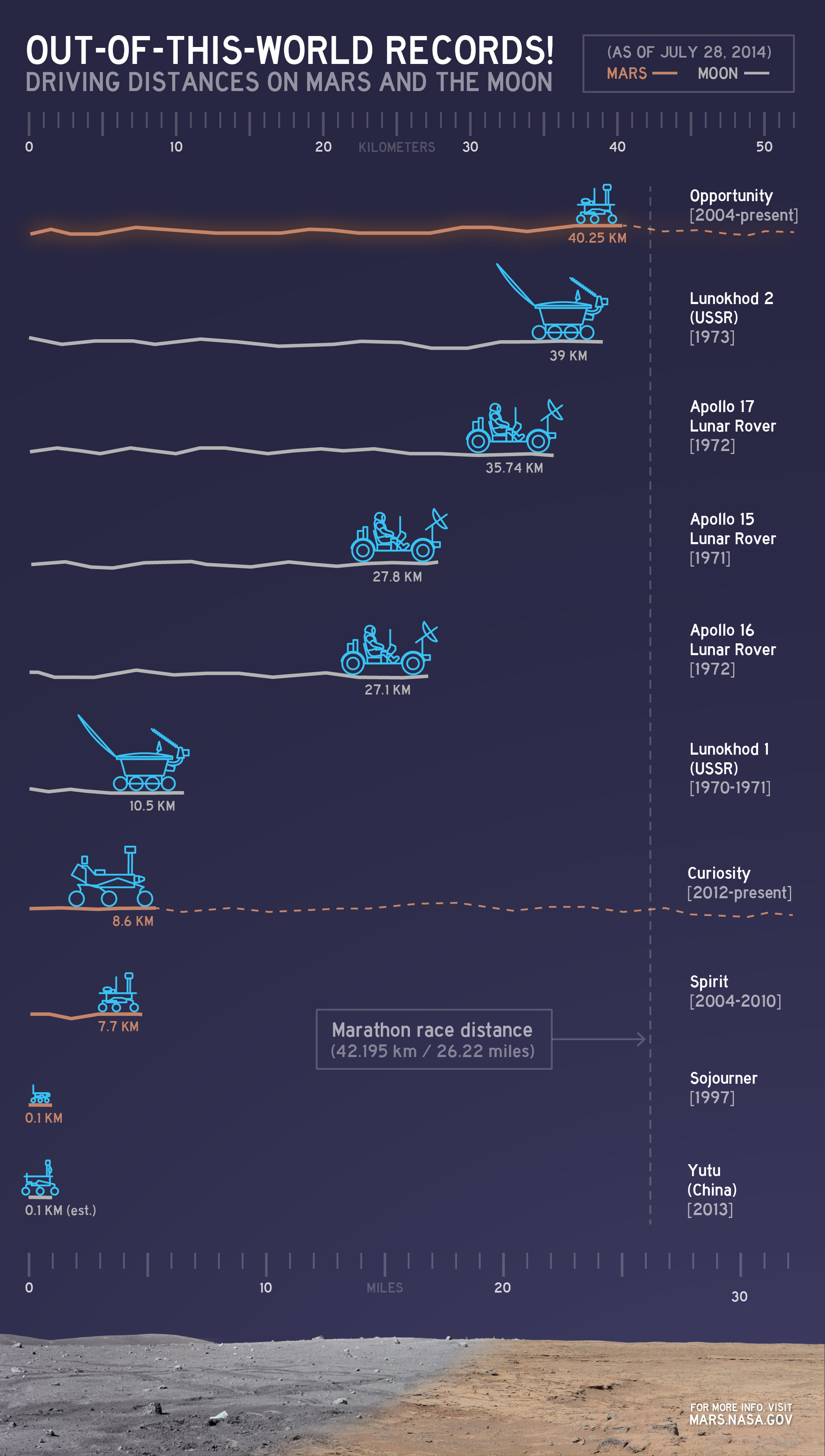
A rover is a vehicle designed to move across the surface of a celestial body.
For the US Apollo program to the Moon the rover was the Apollo Lunar Roving Vehicle which was added to the program for Apollo 15, 16, and 17.
For the USSR N1/L3 program to the Moon the rover was the Lunokhod which was sent to the Moon separately from the planned N1/L3 program and driven remotely.
More recently China, India, and Japan have sent autonomous rovers to the Moon.
These were called Yutu, Pragyan, and LEV.
Autonomous rovers have also been operated on Mars.
These include Sojourner, the MERs Spirit and Opportunity, Curiosity, and Perseverance.
While the MERs Spirit and Opportunity were the same,
the NASA rover Perseverance, was similar in design to the Curiosity rover, but modified based on learnings from Curiosity and different goals.
Perseverance also deployed the experimental helicopter Ingenuity, which in April 2021 performed the first powered and controlled flight on another planet.
It's important that drivetrains be designed so that the rover won't get stuck. There are no roads on the Moon or Mars so rovers are like off road vehicles that need to be able to traverse rough terrain. They need to be designed and guided so that they do not get stuck. There are also differences in the gravity on the Moon and Mars which would lead to differences in how the suspension and mobility systems would be built.
All of these rovers used electric motors to drive wheels, but they didn't use the same drivetrains or batteries. The Apollo Lunar Rovers had four wheels similar to a car. The wheels consisted of a spun aluminum hub and an 81.8 cm diameter, 23 cm wide tire made of zinc coated woven steel strands. Titanium chevrons covered half of the contact area to provide traction. Each wheel had its own electric drive, a DC series wound 190 w motor capable of 10,000 rpm, attached to the wheel via an 80:1 harmonic drive, and a mechanical brake unit. The Lunokhod rovers had eight wheels. Each wheel had an independent suspension, motor, and brake. The rover had two speeds, ~1 km/hr and ~2 km/hr. Mars rovers, like Lunar rovers, have also used electric motors. However, Sojourner and subsequent US Mars rovers have used six wheels in a rocker-bogie suspension arrangement. Sojourner had six wheels and moved at speeds up to 0.036 km/hr. The rover's wheels and suspension used a rocker-bogie system that is unique in that it did not use springs. Rather, its joints rotated and conformed to the contour of the ground, providing the greatest degree of stability for traversing rocky, uneven surfaces. A six wheeled vehicle with rocker-bogie suspension can overcome obstacles three times larger than those crossable by a four wheeled vehicle of equal wheel size. For example, one side of Sojourner could tip as much as 45 degrees as it climbed over a rock without tipping over. The wheels were 13 cm in diameter and made of aluminum with stainless steel cleats for traction. Three motion sensors along Sojourner's frame detected excessive tilt in order to stop the rover before it could tip over. Sojourner was capable of scaling a rock on Mars more than 20 cm. The Mars Exploration Rovers Spirit and Opportunity each had six wheels. Each wheel had its own individual motor. The design of the suspension system for the wheels is similar to the rocker-bogie system on the Sojourner rover. This system causes the rover body to go through only half of the range of motion that the wheels could potentially experience without a rocker-bogie suspension system. China's Yutu rovers each had six wheels.
| Rover | mission type | country of development | mass (kg) | drivetrain | wheel diameter (mm) | electricity storage | control system technology |
|---|---|---|---|---|---|---|---|
| Luna 17, 21 / Lunokhod 1, 2 | Lunar Rover | USSR | 756 | 8 wheel | remote control (R/C) by humans | ||
| Apollo 15, 16, 17 Lunar Roving Vehicle | Lunar Rover | USA | 210 | 4 wheel | 818 | silver oxide zinc batteries | local control by humans (astronauts) |
| Mars Pathfinder / Sojourner | Mars Rover | USA | 11.5 | 6 wheel | 130 | lithium thionyl chloride (LiSOCL2) batteries | Intel 80C85 (8080 architecture) on Sojourner rover |
| MER-A, B aka Spirit, Opportunity | Mars Rover | USA | 185 | 6 wheel | 250 | lithium ion batteries | IBM RAD6000 (POWER architecture) |
| MSL Curiosity | Mars Rover | USA | 899 | 6 wheel | 500 | lithium ion batteries and radioisotope thermoelectric generator | RAD750 (POWER architecture) |
| Chang'e 3, 4 / Yutu-1, 2 | Lunar Rover | China | 140 | 6 wheel | |||
| Perseverance | Mars Rover | USA | 1025 | 6 wheel | 525 | 2 lithium ion batteries and 1 radioisotope thermoelectric generator | RAD750 (POWER architecture) |
| Tianwen-1 / Zhurong | Mars Rover | China | 240 | 6 wheel | |||
| Chandrayaan-3 / Vikram / Pragyan | Lunar Rover | India | 26 | 6 wheel | |||
| SLIM / LEV-1 | Lunar Rover | Japan | 2.1 | hopping on 1 foot, no wheels | na | ||
| SLIM / LEV-2 aka SORA-Q | Lunar Rover | Japan | 0.25 | extends shape to crawl using 2 wheels | 80 |
Gallery of Rovers that operated on the Moon or Mars









Most rovers have used electric batteries, or batteries partnered with solar panels or radioisotope thermoelectric generators. It's important that batteries are light weight, can hold a charge, and if partnered with solar panels can be charged efficiently. For the Apollo Lunar rovers, power was provided by two 36-volt silver oxide zinc non rechargeable batteries with a capacity of 121 amp-hr. For the Lunokhod rovers, power was supplied by batteries charged by a solar panel on the inside of a round hinged lid which covered the instrument bay. Sojourner used 9 lithium thionyl chloride (LiSOCL2) D-cell sized batteries. It also had 13 strings of 18, 5.5 mil GaAs solar cells each, for a total of 0.22 square meters. This combined batteries/solar panels provided Sojourner 30W of peak power (mid-sol) which included 16W peak solar panel production. When fully illuminated, the MERs (Spirit and Opportunity) solar arrays generate about 140 watts for up to four hours per Martian day (sol). The MERs needs about 100 watts to drive. The the MERs power system used two rechargeable lithium ion batteries weighing 7.15 kg each. These are similar to but larger than what is used today in most smartphones and laptop computers. China's Yutu rovers power supply included solar panels. The Curiosity rover is powered by a radioisotope thermoelectric generator (RTG), like the Viking 1 and 2 Mars landers. Curiosity's RTG is fueled by 4.8 kg of plutonium-238 dioxide. The RTG is designed to produce 110 watts of electrical power and about 2000 watts of thermal power at the start of the mission. The power source generates 9 MJ (2.5 kWh) of electrical energy each day, more than the solar panels of the previous MERs, which generated 2.1 MJ (0.58 kWh) each day. The RTG charges two rechargeable lithium ion batteries which power the rover's activities. Each battery has a capacity of about 42 ampere hours. The Perseverance rover's radioisotope thermoelectric generator (RTG) has a mass of 45 kg and uses 4.8 kg of plutonium-238 oxide. Unlike solar panels, the RTG provides more continuous power.
The Apollo Lunar Rovers had a simple navigation system to help the astronauts know how far and in what direction the Lunar Module was. Using cameras on the Lunokhod rovers, a five person team on Earth sent remote control driving commands to the Lunokhod rover in real time. More recently, the Sojourner rover used an 8085 processor to aid guidance, navigation, and control, and the MERs Spirit and Opportunity, and the Curiosity rover have all used Power processors along with sensors and electro-mechanical actuators for this purpose. Sojourner rover software was written with the ANSI C programming language, and consisted of a single-threaded control loop, with interrupt handling only for exception condition. The control loop performed periodic functions, requested command sequence uplinks, and dispatched commands to the appropriate command handlers. Command and telemetry for the Sojourner rover was provided by modems on the rover and the Pathfinder lander. The rover would request from the lander transmission of any commands sent from Earth. When commands were not available, the rover would transmit any telemetry collected to the lander which in turn forwards them to Earth. Commands for the Sojourner rover were generated and analysis of telemetry was performed at the rover control workstation on Earth. Commands received by NASA's Mars rovers would not be executed in real time, but rather would be a sequence of operations to carry out during the day. This necessitated a degree of autonomy on the rovers so that they would prevent themselves from getting stuck on a regular basis. Little detail is available on guidance, navigation, and control of China's Yutu rovers.
While Mars is farther from the Sun than the Earth and the Moon and thus colder on average, the 14 days of sunlight followed by 14 days of night on the Moon causes much larger termperature variations than on Mars or Earth. Further the effects of the atmosphere and oceans of the Earth, aren't available to transfer heat from places in sunlight to places in shadow on the Moon. The Apollo Lunar Rovers only had to work on the Moon during the duration of the manned mission which was only a couple of days during Lunar morning. However, even though they only had to work for a couple of days, the Apollo Lunar Rovers were never parked in the shade of the Apollo Lunar Module because they would get too cold there. The rovers used tanks filled with paraffin wax to store excess heat from electronics while driving. The heat would melt the paraffin wax. This heat would then be released through mirrored radiators when the rover was parked causing the paraffin wax to solidify. Unlike Apollo, the Lunokhod rovers survived from 4 to 10 months on the Moon. The Lunokhods had solar panels mounted on the underside of a lid. During the Lunar days, the lid was open and the solar panels were exposed to the Sun to generate electricity. During the Lunar nights, the lid was closed to allow a polonium-210 isotopic heat source to keep components at operating temperature. The Yutu rover went to sleep during lunar nights. Similar to the Lunokhods, it used radioisotope heater units which used plutonium-238 and two-phase fluid loops. China's Yutu rovers also used radioisotope heater units using plutonium-238 and two phase fluid loops. Mars rovers have also used radioisotope heater units along with electrical heaters; however, they haven't had to deal with significantly higher day time temperatures than night time temperatures as found on the Moon. Finally, the private company LunaCorp, which had plans for a Lunar rover, had plans at one point that called for continuously driving the rover in the direction of the Sun at a high latitude, to keep the rovers solar panels always in sunlight and to keep the temperature relatively consistent.