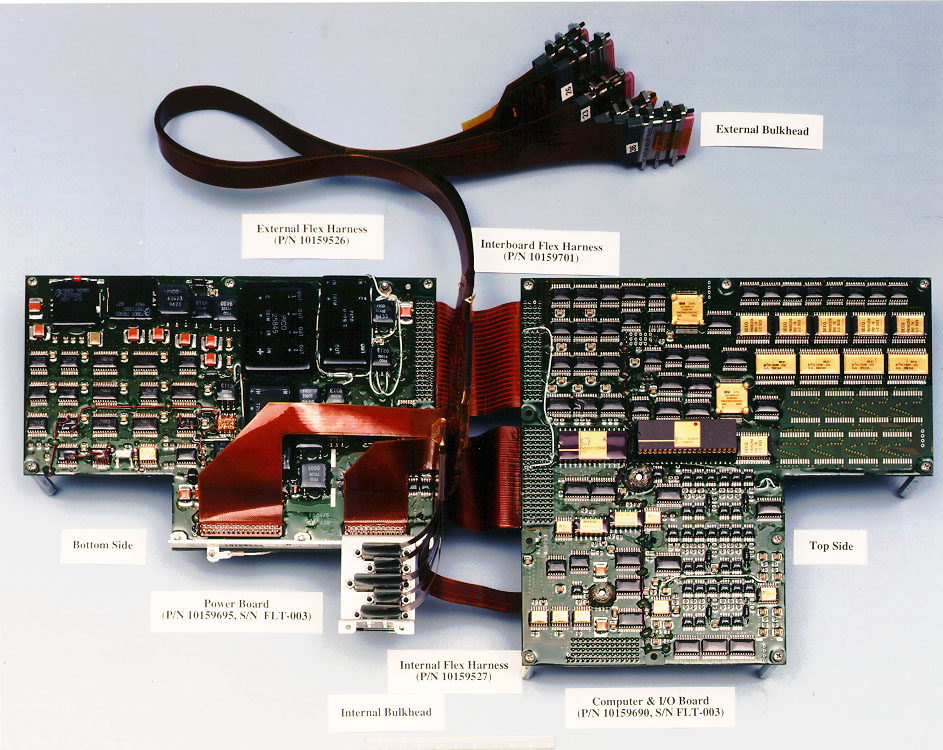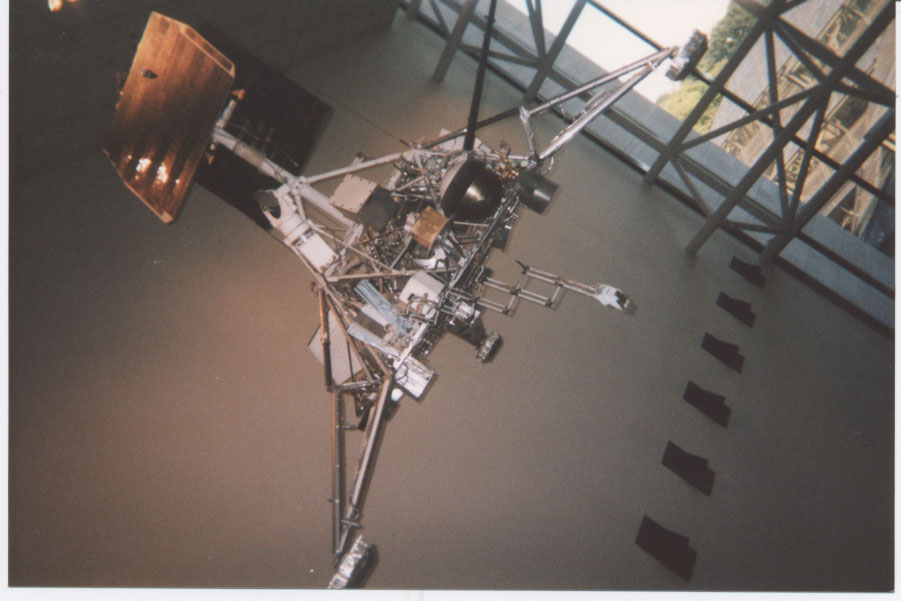
Surveyor Lunar lander spacecraft designed prior to Apollo
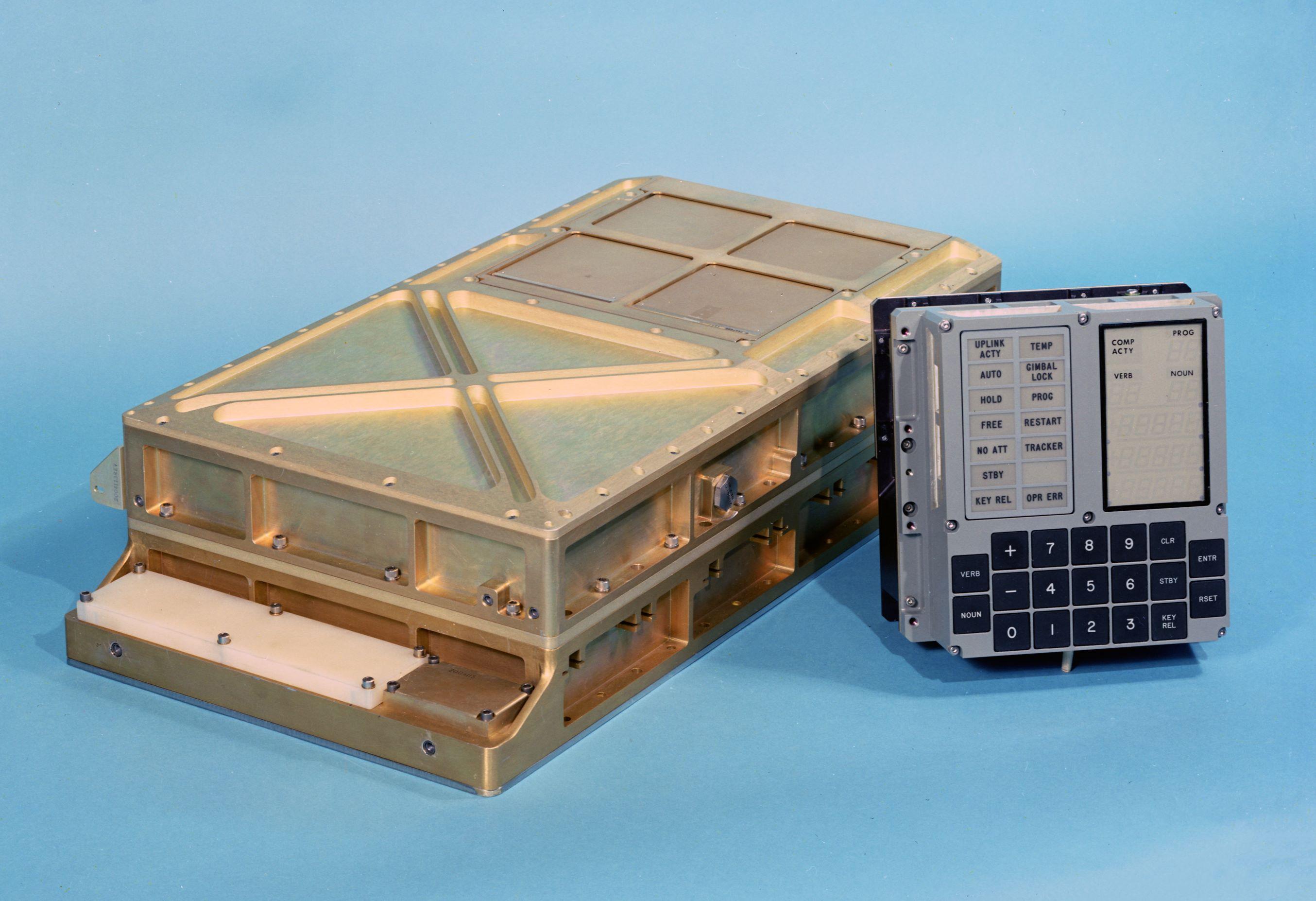
an AGC (Apollo Guidance Computer)
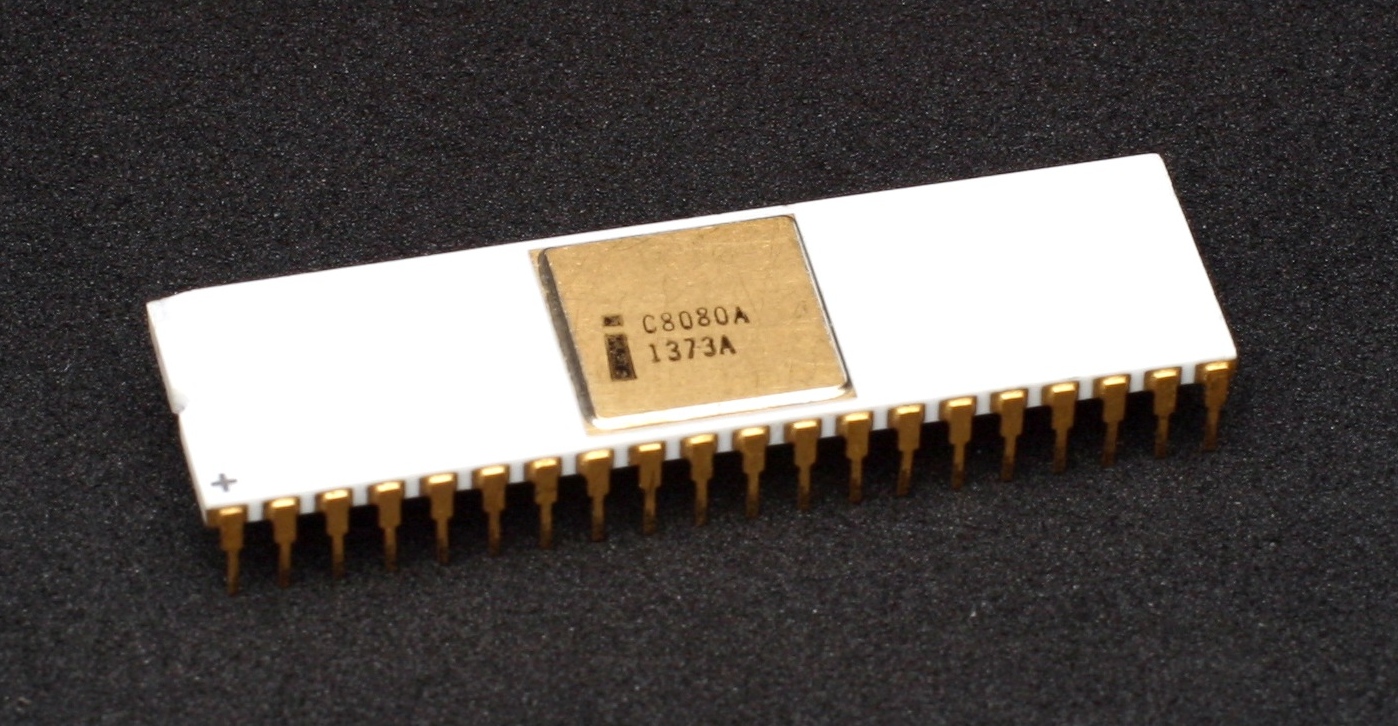
an Intel 8080

MOS Technology 6502
A control system controls the behavior of subsystems in a device or craft. Control systems or navigation, guidance, and control systems have been used in spacecraft since the beginning of the space age, although they haven't always been what we think of as computer based control systems of today. The first spacecraft used mechanical timers or simple RC (resistor/capacitor) circuit timers for initiating mechanical activities. They focused on sequencing activities based on an amount of elapsed time. These systems were thus referred to as sequencing and control systems. Attitude control electronics were generally non-linear analog "computers" which were used to switch on and off control thrusters and point instruments.
The computer developed for use in Apollo spacecraft, the Apollo Guidance Computer (aka AGC ), was revolutionary because it used digital logic gates on integrated circuits, ICs, or just chips, making it very small with low power consumption compared to other digital electronic computers of the time. It was also part of a more complex system referred to as a navigation, guidance, and control system because it had sensors such as an inertial navigation system, in addition to timers, that fed data to the guidance computer which in turn opened and closed valves for rockets and thrusters.
Electronics makers continued to condense digital electorincs beyond digital logic gates on chips to the point that Texas Instruments (aka TI) and Intel were each able to produced a computer processor on a chip, called a microprocessor. The TI TMS 1000 microprocessor was embedded in a calculator TI sold, but was not available for direct purchase. The Intel 4004 microprocessor was available for direct purchase to build other devices from. Intel's 4004 microprocessor was followed by the 4040, the 8008, and then the 8080 which lead to the first popular personal computer. For embedded control systems, additional circuitry to run timers, control output ports, or to read instrument inputs were added to chips leading to devices called microcontrollers.
Since microcontrollers are typically low power digital circuits and electromechanical devices such as motors and solenoids can require higher power analog circuits, there is typically separate circuitry to control these devices. For example, in order to be able to switch the current direction to the motor you need a circuit called an H-bridge. An H-bridge could be built from scratch with transistors, but it's such a popular circuit that electronics makers condensed these into chips also.
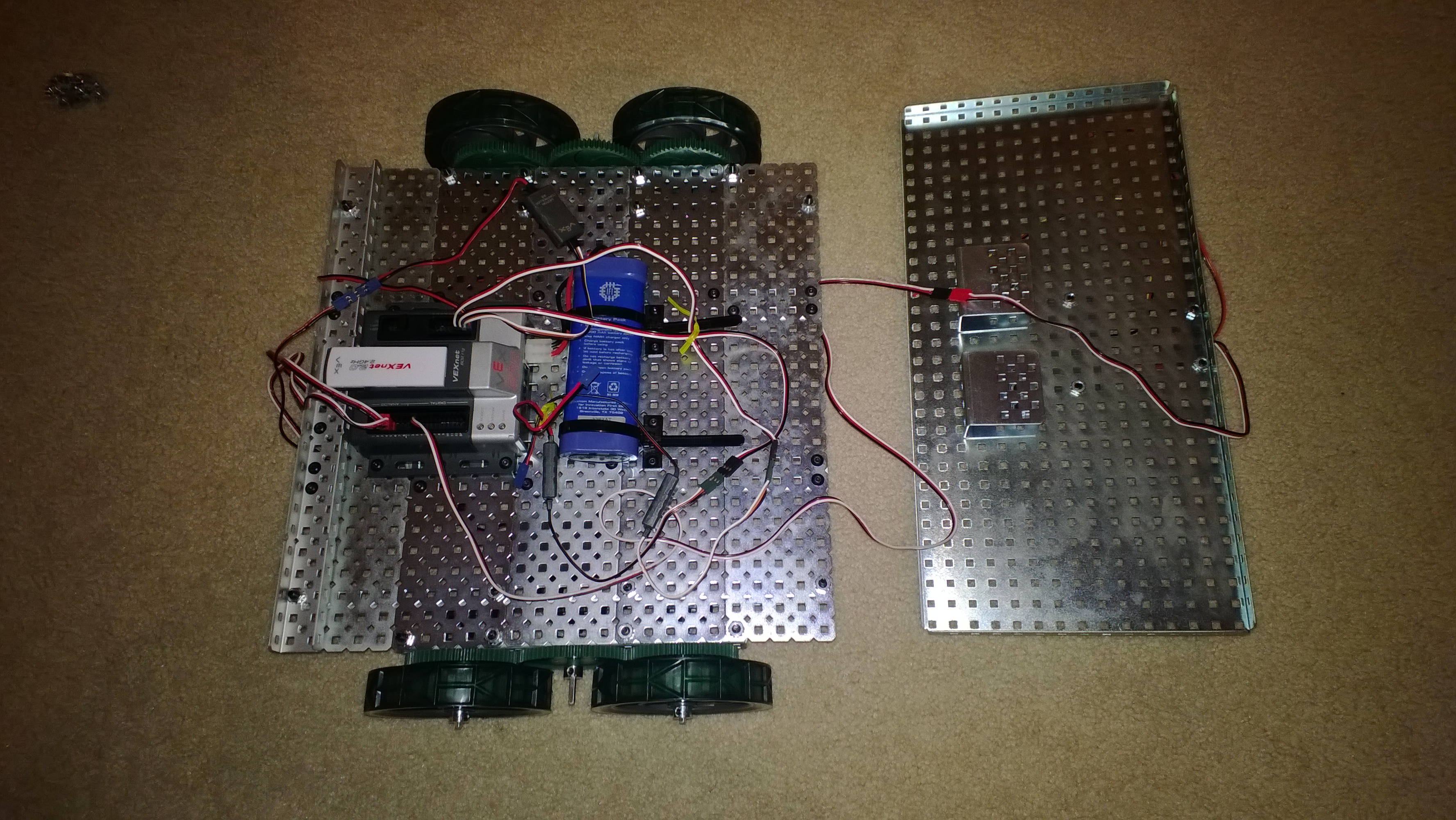
Working Example
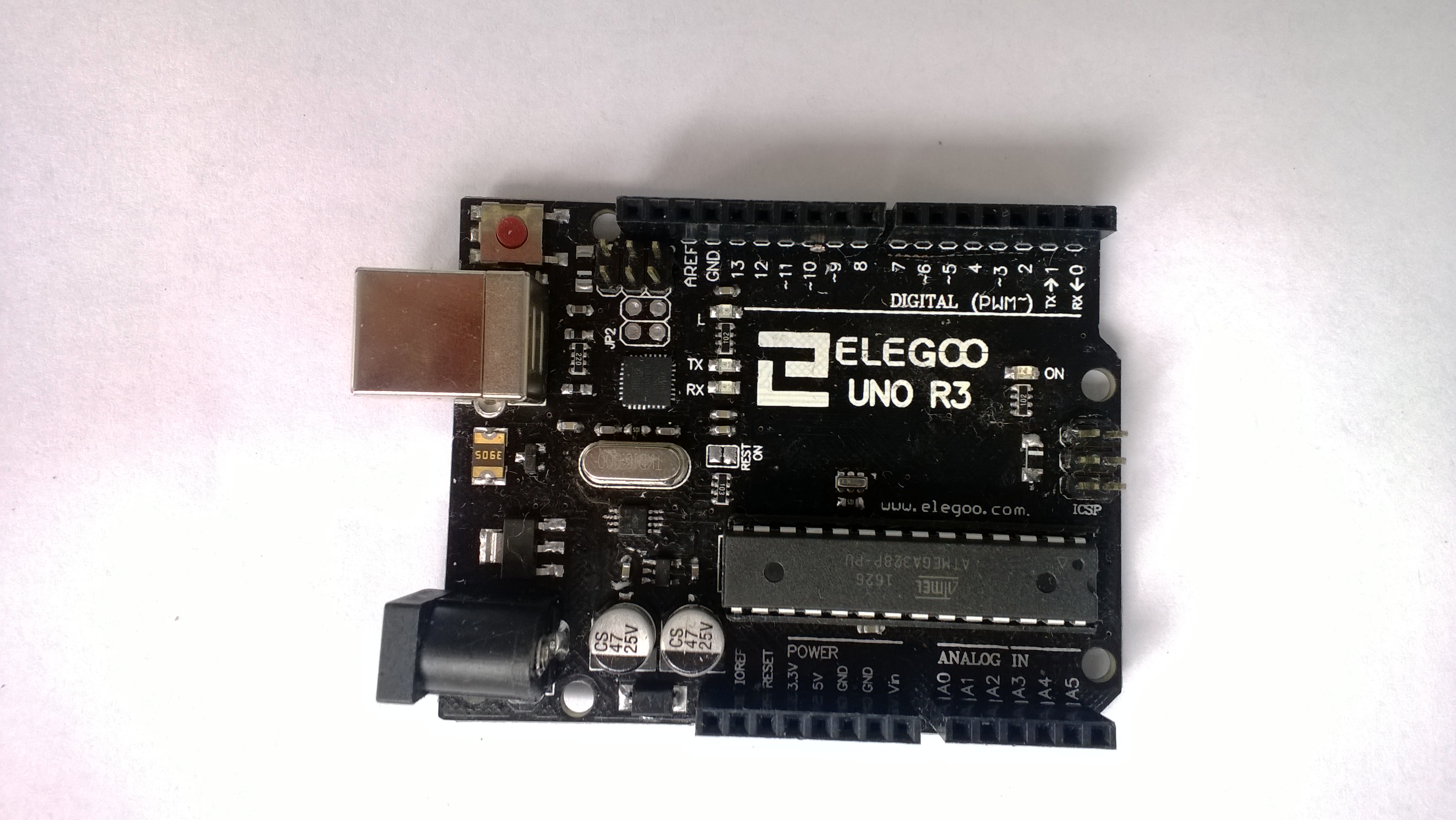
For students who want to experiment with a working example, if you want to build your own controller device, you could start with digital logic gates, but you probably want to leverage options that already incorporate a number of features. You can then wire these options up to electric motors, or solenoids, or lights that you want to control.
Five options to consider if you want to build a simple electronic controller are: